×
Параметры криволинейного движения – это период, число оборотов (частота), линейная скорость, угловое перемещение, угловая скорость, нормальное ускорение, тангенциальное ускорение.
Тело движется по окружности. За время ${t}$ тело совершает ${N}$ оборотов.
1. Период ${(Т)}$ – это время, за которое тело совершает один полный оборот: $${T = \frac {t}{N}}$$ Единица измерения периода в системе единиц СИ: ${[Т] = [с] (1 секунда).}$
2. Число оборотов (частота) ${(n)}$ – это число оборотов, которое совершает тело в единицу времени: $${n = \frac {N}{t}; n = \frac{1}{T}}$$ Единица измерения частоты в СИ: ${[n] = [ с^{-1}].}$
Тело движется по окружности (рис. 8.2.1). За время ${t}$ тело перемещается по окружности на расстояние ${S.}$
3. Линейная скорость ${(\overrightarrow V)}$ – это скорость, с которой точка движется по окружности (рис. 8.2.1): $${V = \frac {S}{t}.}$$ Единица измерения линейной скорости в системе единиц СИ: ${[V] = [м/с].}$
Линейная скорость направлена по касательной к траектории в данной точке окружности (рис. 8.2.1).
4. Угловое перемещение ${(\phi)}$ – это угол, на который поворачивается радиус-вектор за время ${t}$ (рис. 8.2.1).
${[\phi] = [фи]}$
Единица измерения углового перемещения в системе единиц СИ:
${[\phi] = [рад] (радиан).}$
${1 рад = 180º/π = 57º18΄.}$
${1º = π/180º рад.}$
Число ${π = 3,14.}$
5. Угловая скорость ${(\overrightarrow \omega)}$ – это физическая векторная величина, численно равная углу поворота радиуса-вектора ${(\phi- \text{угловое перемещение})}$ за единицу времени: $${\omega = \frac {\phi}{t}; [\omega] = [омега]}$$ Единица измерения в СИ:
${[\omega] = [рад/с] }$ (радиан в секунду).
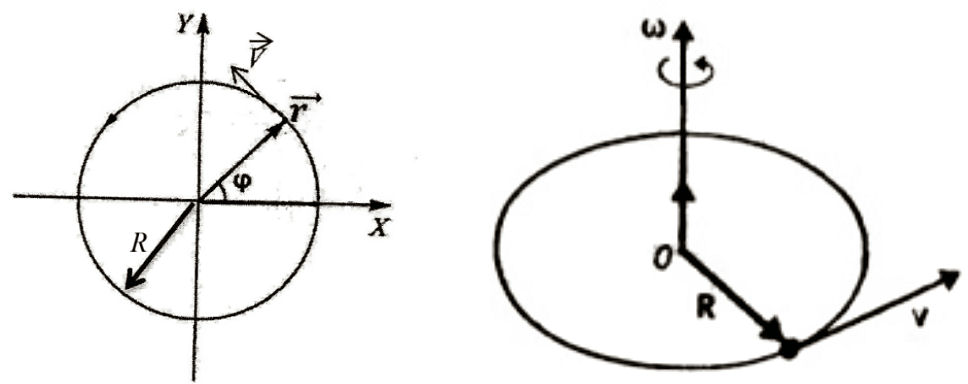 Рис. 8.2.1. Движение тела по окружности
Рис. 8.2.1. Движение тела по окружности
Связь между линейной и угловой скоростью Тело движется по окружности радиусом ${R}$ (рис. 8.2.1). Скорость тела не изменяется. Тело делает один оборот за время равное периоду ${(t = Т).}$ Форма траектории – окружность. Длина окружности: $${S = 2 \pi R}$$ Модуль линейной скорости равен:
${V = \frac{S}{t} =}$ ${\frac{2 \pi R}{T}.}$
Величина ${\frac {1}{T} = n.}$
Подставим в формулу линейной скорости:
${V = \frac{2 \pi R}{T} =}$ ${2 \pi R n}$ – это формула линейной скорости через число оборотов.
Тело сделало один оборот. Радиус-вектор повернулся на угол ${\phi = 2\pi.}$ . Напишем формулу угловой скорости:
${\omega = \frac{\phi}{t} =}$ ${\frac {2\pi}{T} = }$ ${2 \pi n}$ – это формула угловой скорости через число оборотов.
Сравним формулы линейной и угловой скорости:
${V = wR}$ – эта формула связывает линейную и угловую скорость.
6. Ускорение
Мальчик вращает камень. Скорость камня не изменяется по величине, а направление скорости изменяется (рис. 8.2.2. А).
Различают разные виды ускорения – это нормальное ускорение и тангенциальное ускорение.
Нормальное ускорение ${(\overrightarrow a_n)}$ – это ускорение, которое характеризует изменение линейной скорости по направлению.
Нормальное ускорение направлено под углом 90o к линейной скорости (рис. 8.2.2. А). Формула нормального ускорения: $${a_n = V^2/R,}$$ где ${V}$ – скорость тела,
${R}$ – радиус окружности.
Единица измерения нормального ускорения в системе единиц СИ:
${[a_n ] = [м/с^2].}$
При движении тела по окружности скорость тела изменяется по величине.
Тангенциальное ускорение ${(\overrightarrow a_{\tau})}$ – это ускорение, которое характеризует изменение скорости по величине:
${a_{\tau} = }$ ${\frac{V_t - V_0}{t}; [\tau] = [тау]}$
Единица измерения тангенциального ускорения в системе единиц СИ:
${[a_\tau] = [м/с^2].}$ .
Вектор тангенциального ускорения направлен по касательной к окружности (рис. 8.2.2. Б).
Полное ускорение равно векторной сумме векторов ${\overrightarrow a_\tau}$ и ${\overrightarrow a_n}$ (рис. 8.2.2. В): $${\overrightarrow a = \overrightarrow a_{\tau} + \overrightarrow a_t}$$ Модуль полного ускорения равен:
${a = \sqrt{a^2_n + a^2_{\tau}}}$ – формула полного ускорения в скалярном виде.
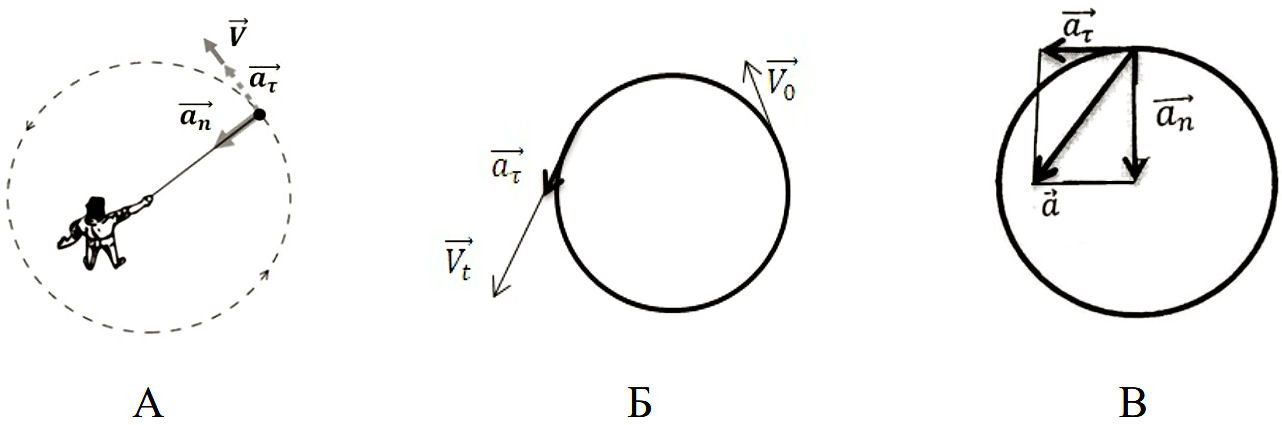 Рис. 8.2.2. Ускорение при движении тела по окружности:
Рис. 8.2.2. Ускорение при движении тела по окружности:
А – нормальное ускорение;
Б – тангенциальное ускорение;
В – полное ускорение
Параметры криволинейного движения – это период, число оборотов (частота), линейная скорость, угловое перемещение, угловая скорость, нормальное ускорение, тангенциальное ускорение.
Тело движется по окружности. За время ${t}$ тело совершает ${N}$ оборотов.
1. Период ${(Т)}$ – это время, за которое тело совершает один полный оборот: $${T = \frac {t}{N}}$$ Единица измерения периода в системе единиц СИ: ${[Т] = [с] (1 секунда).}$
2. Число оборотов (частота) ${(n)}$ – это число оборотов, которое совершает тело в единицу времени: $${n = \frac {N}{t}; n = \frac{1}{T}}$$ Единица измерения частоты в СИ: ${[n] = [ с^{-1}].}$
Тело движется по окружности (рис. 8.2.1). За время ${t}$ тело перемещается по окружности на расстояние ${S.}$
3. Линейная скорость ${(\overrightarrow V)}$ – это скорость, с которой точка движется по окружности (рис. 8.2.1): $${V = \frac {S}{t}.}$$ Единица измерения линейной скорости в системе единиц СИ: ${[V] = [м/с].}$
Линейная скорость направлена по касательной к траектории в данной точке окружности (рис. 8.2.1).
4. Угловое перемещение ${(\phi)}$ – это угол, на который поворачивается радиус-вектор за время ${t}$ (рис. 8.2.1).
${[\phi] = [фи]}$
Единица измерения углового перемещения в системе единиц СИ:
${[\phi] = [рад] (радиан).}$
${1 рад = 180º/π = 57º18΄.}$
${1º = π/180º рад.}$
Число ${π = 3,14.}$
5. Угловая скорость ${(\overrightarrow \omega)}$ – это физическая векторная величина, численно равная углу поворота радиуса-вектора ${(\phi- \text{угловое перемещение})}$ за единицу времени: $${\omega = \frac {\phi}{t}; [\omega] = [омега]}$$ Единица измерения в СИ:
${[\omega] = [рад/с] }$ (радиан в секунду).
Рис. 8.2.1. Движение тела по окружности
Связь между линейной и угловой скоростью Тело движется по окружности радиусом ${R}$ (рис. 8.2.1). Скорость тела не изменяется. Тело делает один оборот за время равное периоду ${(t = Т).}$ Форма траектории – окружность. Длина окружности: $${S = 2 \pi R}$$ Модуль линейной скорости равен:
${V = \frac{S}{t} =}$ ${\frac{2 \pi R}{T}.}$
Величина ${\frac {1}{T} = n.}$
Подставим в формулу линейной скорости:
${V = \frac{2 \pi R}{T} =}$ ${2 \pi R n}$ – это формула линейной скорости через число оборотов.
Тело сделало один оборот. Радиус-вектор повернулся на угол ${\phi = 2\pi.}$ . Напишем формулу угловой скорости:
${\omega = \frac{\phi}{t} =}$ ${\frac {2\pi}{T} = }$ ${2 \pi n}$ – это формула угловой скорости через число оборотов.
Сравним формулы линейной и угловой скорости:
${V = wR}$ – эта формула связывает линейную и угловую скорость.
6. Ускорение
Мальчик вращает камень. Скорость камня не изменяется по величине, а направление скорости изменяется (рис. 8.2.2. А).
Различают разные виды ускорения – это нормальное ускорение и тангенциальное ускорение.
Нормальное ускорение ${(\overrightarrow a_n)}$ – это ускорение, которое характеризует изменение линейной скорости по направлению.
Нормальное ускорение направлено под углом 90o к линейной скорости (рис. 8.2.2. А). Формула нормального ускорения: $${a_n = V^2/R,}$$ где ${V}$ – скорость тела,
${R}$ – радиус окружности.
Единица измерения нормального ускорения в системе единиц СИ:
${[a_n ] = [м/с^2].}$
При движении тела по окружности скорость тела изменяется по величине.
Тангенциальное ускорение ${(\overrightarrow a_{\tau})}$ – это ускорение, которое характеризует изменение скорости по величине:
${a_{\tau} = }$ ${\frac{V_t - V_0}{t}; [\tau] = [тау]}$
Единица измерения тангенциального ускорения в системе единиц СИ:
${[a_\tau] = [м/с^2].}$ .
Вектор тангенциального ускорения направлен по касательной к окружности (рис. 8.2.2. Б).
Полное ускорение равно векторной сумме векторов ${\overrightarrow a_\tau}$ и ${\overrightarrow a_n}$ (рис. 8.2.2. В): $${\overrightarrow a = \overrightarrow a_{\tau} + \overrightarrow a_t}$$ Модуль полного ускорения равен:
${a = \sqrt{a^2_n + a^2_{\tau}}}$ – формула полного ускорения в скалярном виде.
Рис. 8.2.2. Ускорение при движении тела по окружности:
А – нормальное ускорение;
Б – тангенциальное ускорение;
В – полное ускорение